
测式
?
目录
?
?
游中国安装调试说明
?
1开箱检查零配件


?
收到货后先按照收货清单点检货物有无缺失,游中国机器人包括1个箱子,1块场地布。设备清单和存放箱子位置如下表:
|
序号 |
清单名称 |
数量 |
备注 |
|
1 |
游中国机器人 |
1 |
1号箱子 |
|
2 |
串口调试线/ASP程序下载线 |
1 |
1号箱子 |
|
3 |
18650锂离子充电电池 |
2 |
1号箱子 |
|
4 |
电池充电器 |
1 |
1号盒子 |
|
5 |
游中国场地布 |
1 |
纸桶包裹 |
|
6 |
工具及配件 |
1 |
1号盒子 |
?


?









?
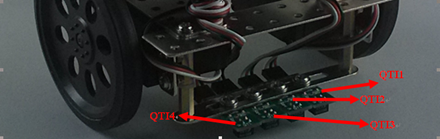
2 游中国机器人硬件连接图
游中国机器人硬件平台主要由Basicduino控制器、金属积木车体、QTI传感器、伺服电机组成。安装QTI传感器时需要注意QTI与地面的理论高度在7~10mm,实际高度还要看环境及QTI的性能,在安装过程中,需要多次调整,找到最佳的安装距离,才能达到更好的循线效果。
?
?
|
QTI传感器连线 |
|
|
传感器 |
BASIC STAMP控制板引脚 |
|
QTI1? |
P11? |
|
QTI2? |
P10? |
|
QTI3? |
P9? |
|
QTI4? |
P8? |
|
伺服电机连线 |
|
|
伺服电机 |
BASIC STAMP控制板引脚 |
|
左电机 |
P15 |
|
右电机 |
P14 |
?
?
?
?
?
?
?
3 单机调试
参见文档《游中国机器人软硬件开发》中的步骤,进行单机测试前的调试。提醒,务必记住,一定要按照步骤逐个机器人进行单元功能测试验证,保证电机、QTI、功能都测试通过后才进行整机的联调。不要觉得应当没有问题就跳过测试,记住任何小功能的异常都会导致整体联调时功能的失步,导致整体功能异常,导致后续的联调分析难度加大。
?
3.1 首先测试QTI传感器
?
1检查 QTI 传感器是否有损坏
步骤:把机器人放在一个平面上,看看 QTI 传感器黑头感应部分与平面之间的距离是否在8~10mm 范围内,否则通过增减尼龙胶垫调整一下高度,两个 QTI 之间距离在 20mm 以上。
实物图
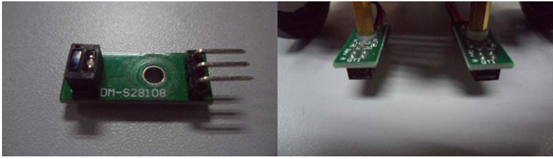
小窍门:检测是否接对的办法:给控制器上电(电源开关拨打 ON1 位置),把 PD7 接口的线拔掉,用你的手机照相机对准传感器感应黑头看看左边 QTI 传感器是否有红外线发出,若有说明连线正确。
用手机摄像头是可以看到红外线的,包括我们日常用的电视遥控器,空调遥控器都可以用这个办法来判断。
?
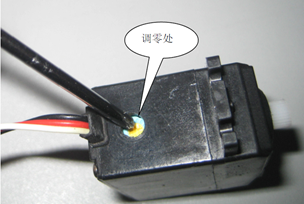
3.2 伺服电机调零
伺服电机使用前一定要调零。用BASIC软件下载《电机调零程序》到机器人,即连续给1.5ms高电平脉冲、20ms的低电平,电源开关拨到 ON1 位置,如果电机出现转动,则用十字螺丝刀轻轻旋转电机上的小孔,如果发现电机转速变快了,则反方向旋转,当电机转很慢时,则微旋转至电机停转。
3.3 接线检查
?
|
Basicduino控制板引脚 |
伺服电机 |
|
P15? |
左电机 |
|
P14? |
右电机 |
?
3.3 QTI 测试
将 QTI测速
程序下载到控制器中,直接在打开的窗口差看 QTI 状态。
将QTI传感器与控制板正确连接起来。下载调试程序,依次让各个QTI处于黑色电工胶布或者喷墨的上方,观察调试终端中有没有0、1的变化。当某个QTI传感器处于桌面上时为0,处于黑线上时为1,则该QTI传感器正常。若显示中始终不变化的,检查该传感器的接线是否正确,并尝试调整传感器与桌面之间的距离,继续测试。 当确定所有QTI传感器都正常工作以后,就可以继续进行后续的任务了。
?
4路线算法
?
路线算法比较复杂晦涩。有兴趣的同事可以参看《游中国机器人软硬件开发》。
?
展开表演场地摆放机器人并务必弄平整
?
5 注意事项
?
5.1 QTI 的固定
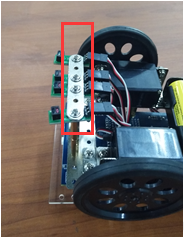
调试中遇到最多的也最容易出现问题的就是QTI的循迹功能出现差错,而且在检查中QTI是正常的,也就是说,他是正常工作的,只是QTI离地面的距离会有误差。分析了QTI的固定结构发现它只有一个铜棒连接。刚性还有稳固性都不是很理想,稍有震动、外力都会引起铜棒弯曲,螺丝松动。从而导致QTI检测段离地面的距离发生变动,从而影响机器人的稳定性。那么,知道了问题就明确了解决的方向,暨增加稳定性和刚性,大家在这个前提下去解决就可以了。我的思路是增加一根固定梁,就是在两个铜棒之间增加一个钢片,那么就会把结构变为相对稳定的4方结构,如图:

?
另外,记得要在QTI和螺丝之间加橡胶垫片,可以加固和防止短路,如图所示:

装好以后就是这个样子,稍微调整一下,让两个QTI之间的距离大概在2CM(线宽1.8CM)左右。
然后再去测试,调整高度的话就加垫片就可以了,建议为8MM左右。
?
5.2 场地布的铺设
场地布务必铺设在平整,干净的平面上。群舞蹈机器人是靠qti检测场地布上的各个节点来获悉位置的。如果节点的位置错误,那么就会在不适当的节点进行下一步程序,表现出来就会让人觉得动作很乱。
固定的方式建议用封箱胶带固定一边,然后拉平,再固定剩下的两个角。
不要固定两个边,这样中间会鼓包,也很难拉平。
6 安装调试常见问题应对
游中国机器人在运行过程中也有可能出现失误,主要是硬件的因素。
问题1:机器人在原地打转,可能的原因及解决办法
原地打转的原因有伺服电机没调零,导致电机接受到脉冲时转动的角度不一致
伺服电机没有调零,需要调零,解决办法详见本文3.2。还有个原因就是最外侧2个QTI传感器离中心过宽,导致转动过度,引起机器人不停的循迹校准
QTI传感器位置过宽,可适当调整QTI传感器与中心距离。还有可能是电机或者QTI传感器的接线接反,导致机器人重复循迹和校准自身位置。
接线错误,详见"游中国机器人硬件连线.doc"。
?
问题2:机器人在路口不转弯,可能的原因及解决办法
因为检测不到信号,所以机器人没有给电机脉冲,所以在路口就直接路过。
QTI传感器位置过高,可适当调整QTI传感器与地面的距离,可参考本文3.5及"模块测试程序.doc"中的QTI测试部分。如果地面不平。这个现象加剧,那么可以考虑是不是轨迹没有被识别。
地图黑色轨迹颜色不够深,导致QTI识别出现失误,可适当调整QTI位置或者用黑色电工胶带粘贴在轨迹上来加深轨迹颜色。
?
?
?
?
?
?





网友评论0条